企业免费推广平台

苏州莱卡激光科技有限公司激光焊接机|激光微加工|激光熔覆|激光自动化配套解决方案
181****1905
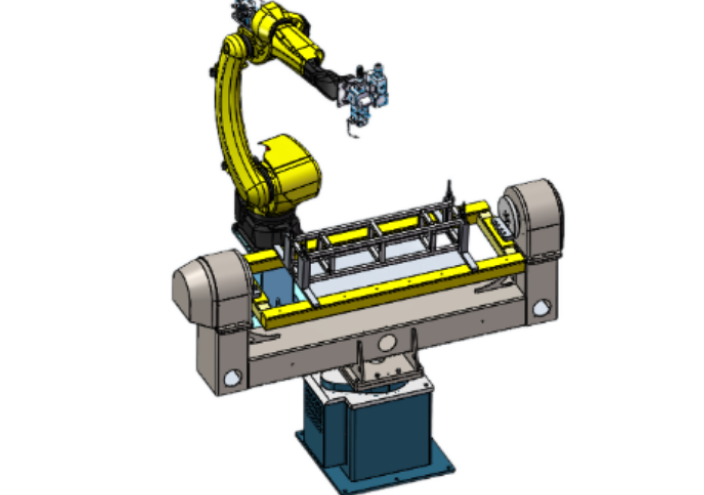
DB-JQR05机器人焊接工作站1.设备介绍:工业机器人焊接工作站(带两轴变位机)主要有焊接机器人、焊接系统、变位机、清枪剪丝装置、设备底座,湖北机器人焊接单价、安全防护系统、电气控制系统、工件夹具等等组成。可完成对系统的构成、调试、二次开发等进行教学和工程实施,同时也可对不同工件进行焊接教学和加工,同时可根据焊接对象的不同对夹具进行二次开发或改进。2.设备组成:序号名称型号/技术参数数量1工业机器人本体1、技术参数≥5kg:6轴:≥IP40:落地:优于或者等于::200-600V,50-60HZ机械装置环境温度运行中:5℃至45℃相对湿度:比较高95%安全性:双运行回路检测,急停和安全功能电路;1轴工作范围+170°/-170°,比较大旋转速度130°/s2轴工作范围+150°/-90°,比较大旋转速度140°/s3轴工作范围+80°/-100°,比较大旋转速度140°/s4轴工作范围+155°/-155°,比较大旋转速度320°/s5轴工作范围+135°/-90°,比较大旋转速度380°/s6轴工作范围+200°/-200°,比较大旋转速度460°/s2、机器人功能要求,使用机器人离线软件进行实时程序,IO,湖北机器人焊接单价,湖北机器人焊接单价,机器人3D动态动作监控。3D实时舒适摇杆手动操作系统。哪里有卖焊接机器人。湖北机器人焊接单价
使用机器人焊接,成本降低的更加明显。4、机器人焊接容易安排生产计划由于机器人可重复性高,只要给定参数,就会永远按照指令去动作,因此机器人焊接产品周期明确,容易控制产品产量。机器人的生产节拍是固定的,因此安排生产计划十分明确。准确的生产计划可应使企业的生产效率、资源的综合利用做到比较大化。5、机器人焊接可缩短产品改型换代的周期机器人焊接可缩短产品改型换代的周期,减小相应的设备投资。可实现小批量产品的焊接自动化。机器人与专机的比较大区别就是他可以通过修改程序以适应不同工件的生产。在产品更新换代时只需要从新根据更新产品设计相应工装夹具,机器人本体不需要做任何改动,只要更改调用相应的程序命令,就可以做到产品和设备更新。已赞过已踩过<。无锡机器人焊接报价哪里有机器人焊接设备?

0≤i≤n,n为空间曲线离散点个数)是用来描述空间曲线焊缝的。坐标系{Hi}的坐标原点和基轴轴向分别表示的是焊枪末端沿着焊缝运动在i时刻的位置及姿态,X轴表示焊缝曲线的切线方向,也即焊枪的前进方向,Z轴表示焊缝曲线的法线方向,也即焊枪的轴向。图中坐标系{G}表示的是工件中心坐标系。图5焊缝坐标系在工件中心坐标系{G}中,建立空间曲线方程为:利用Matlab将该焊缝轨迹的数学模型提取出来,并将其轨迹曲线均匀离散化处理后,计算出每个离散点的位置及姿态,即构成焊缝坐标系。焊缝坐标系{Hi}相对于工件中心坐标系{G}位姿矩阵可表示为[3]:各离散点的位置计算,也即焊缝坐标系{Hi}原点位置计算。本文中设定离散点个数为100,即=100。在Matlab中绘制该马鞍型焊缝轨迹线,得到如图6所示马鞍型焊缝方向矢量中的黑色曲线。各离散点的姿态计算,也即焊缝坐标系{Hi}基轴轴向计算。其中式(9)中向量、向量和向量分别为焊缝坐标系{Hi}的X轴,Y轴和Z轴分别在工件坐标系{G}基轴方向下的分量。方向向量:焊枪前进方向,为空间焊缝曲线的切线方向,即图6中蓝色箭头线所示;方向向量:焊枪轴线方向,为焊缝曲线法平面与两个圆管曲面所成曲线的切线夹角的平分线方向,如图6所示。
其反面也能够对工件进行焊接。以上六点是机器人焊接工装夹具与普通焊接夹具的主要不同之处,设计机器人焊接工装夹具时要充分考虑这些区别,使设计出来的夹具,能满足使用要求。二、对机器人焊接工装夹具的设计要求⑴、机器人焊接工装夹具应动作迅速、操作方便,操作位置应处在工人容易接近、**易操作的部位。当夹具处于夹紧状态时,应能自锁。⑵、夹具应有足够的装配、焊接空间,所有的定位元件和夹紧机构应与焊道保持适当的距离。⑶、夹紧可靠,刚性适当。夹紧时不破坏焊接的定位位置和几何形状,夹紧后既不使焊件松动滑移,又不使焊件的拘束度过大而生产较大的应力。⑷、夹紧时不应破坏焊件的表面质量,夹紧薄件时,应限制夹紧力,或者采取压头行程限位、加大压头接触面积、加添铜、铝衬套等措施。⑸、夹具的施力点应位于焊件的支承处或者布置在靠近支承的地方,要防止支承反力与夹紧力、支承反力与重力形成力偶。⑹、为了便于控制,在同一个夹具上,定位器和夹紧机构的结构形式不宜过多,并且尽量只选用一种动力源。⑺、工装夹具本身应具有较好的制造工艺性和较高的机械效率。三、焊接工装夹具设计方案的确定确定工装夹具方案时,夹具的合理性和经济性是主要考虑的因素。自动机器人焊接有哪些优点?

两个六轴焊接机器人(2、3)开启激光寻位系统223,利用激光先对所述工位的焊缝位置与物料放置的位置是否有偏差,如果位置有偏差,则对该偏差位置进行校正,校正后再焊接,如果位置无偏差,则直接焊接。本发明安装了激光寻位系统223,利用激光寻位先对各种类型的焊缝位置进行搜寻,判断实际位置与基准位置的偏差,从而矫正焊接时的位置偏差***应说明的是:以上实施例*用以说明本发明而并非限制本发明所描述的技术方案;因此,尽管本说明书参照上述的各个实施例对本发明已进行了详细的说明,但是,本领域的普通技术人员应当理解,仍然可以对本发明进行修改或等同替换;而一切不脱离本发明的精神和范围的技术方案及其改进,其均应涵盖在本发明的权利要求范围中。机器人焊接精度怎么样?浙江多功能机器人焊接哪家便宜
全自动焊接机器人加工哪个好?湖北机器人焊接单价
焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。焊接机器人示意图世界各国生产的焊接用机器人基本上都属关节机器人,绝大部分有6个轴。其中,1、2、3轴可将末端工具送到不同的空间位置,而4、5、6轴解决工具姿态的不同要求。焊接机器人本体的机械结构主要有两种形式:一种为平行四边形结构,一种为侧置式(摆式)结构。侧置式(摆式)结构的主要优点是上、下臂的活动范围大,使机器人的工作空间几乎能达一个球体。因此,这种机器人可倒挂在机架上工作,以节省占地面积,方便地面物件的流动。但是这种侧置式机器人,2、3轴为悬臂结构,降低机器人的刚度,一般适用于负载较小的机器人,用于电弧焊、切割或喷涂。平行四边形机器人其上臂是通过一根拉杆驱动的。拉杆与下臂组成一个平行四边形的两条边。故而得名。早期开发的平行四边形机器人工作空间比较小(局限于机器人的前部),难以倒挂工作。但80年代后期以来开发的新型平行四边形机器人。 湖北机器人焊接单价
苏州莱卡激光科技有限公司位于相渭塘镇凤南路99号2号厂房1层南侧,是一家专业的激光设备和自动化设备的组装;研发、销售:激光应用设备;激光技术服务、激光技术咨询、激光设备零配件维修保养、设备维修保养;承接激光设备委托代加工;自营和代理各类商品及技术的进出口业务。公司本着诚信,专业,共赢的经营理念,以市场为导向,以技术研发为基础,以系统的售后服务为根本。用诚信的态度,专业的技术,与各方客户共赢共创,共同发展!公司。在苏州莱卡激光近多年发展历史,公司旗下现有品牌莱卡激光等。公司不仅仅提供专业的激光设备和自动化设备的组装;研发、销售:激光应用设备;激光技术服务、激光技术咨询、激光设备零配件维修保养、设备维修保养;承接激光设备委托代加工;自营和代理各类商品及技术的进出口业务。公司本着诚信,专业,共赢的经营理念,以市场为导向,以技术研发为基础,以系统的售后服务为根本。用诚信的态度,专业的技术,与各方客户共赢共创,共同发展!,同时还建立了完善的售后服务体系,为客户提供良好的产品和服务。诚实、守信是对企业的经营要求,也是我们做人的基本准则。公司致力于打造高品质的激光焊接机,激光微加工,激光熔覆,激光自动化配套解决方案。
本站提醒: 以上信息由用户在商名网发布,信息的真实性请自行辨别。服务协议 - 信息投诉/删除/联系本站
苏州莱卡激光科技有限公司 Copyright © 商名网营销建站平台 All Rights Reserved.

